应用材料(中国)有限公司 200000
摘要:本文对硅片传输机械手的改进及其定位精度进行了分析研究。当前,我国集成电路高速发展,其中高速、平稳的硅片机械手在运行速度上和控制精度上都具有一定的功能性优势,大大地提高了工业领域生产效率,有效推动了我国工业企业不断进步,取得了良好的经济效益与社会效益,具有非常深远的研究价值。
关键词:硅片;传输机械手;改进;重复定位精度
前言:如今,人们越来越重视机械制造领域的发展,基于此,要进一步强化对传输机械手的改进与定位精度的研究。机械手是一门综合性非常强的学科,不仅仅包括机械技术,还包括自动化技术、传感器技术与电气液等多种技术手段,工业机械手在工业领域发挥着重要作用,作业精度极高,在当前具有很大的发展潜力。
1硅片传输机械手机械结构及改进
本文研究的硅片传输机械手是基于半导体薄膜设备的基础上展开的,主要包括硬件安装和软件安装,其中软件包括设备的控制软件,设备固件,人机交互软件等调试机械手臂的调试,腔体内硅片上下运动机构的调试,各种温控装置以及压力装置的调试,冷却水回流装置的调试等维护保证设备正常运作,有警告和报警及时解决,周期性检测设备的运行状况,保证产品的正常输出。
半导体的薄膜设备,在干净的硅片上需要进行不同厚度和尺寸的镀膜,薄膜设备需要满足不同工艺要求的各种参数,例如腔体的温度,压力,腔体的大小,不同的工艺要求也需要匹配其相应的腔体,比如等离子增强化学气相沉积腔体,压大气压沉积腔体,高深宽比的腔体等,其传输工位构成如图1所示。

图 1 传输工位构成
1.1升降旋转运动
硅片传输机械手作用在于运输晶圆进行工位间的移动,在进行升降和旋转运动时,系统内部电机会带动机械结构中位于最上方的齿轮,同步齿轮后动力继续传递至齿形带轮,完成机械手的旋转动作。一个完整的薄膜设备一般由三个工艺腔体、一个传送腔体、一个硅片的预加热腔体以及硅片的传送设备组成,再结合机械手臂从晶舟取出硅片,对硅片进行镀膜并传回晶舟的过程,期间会涉及到冷却水,工艺气体对输入和输出,副产物的抽离等。经过调试的半导体薄膜设备,运行状态稳定,能够保证升降运动正常执行,设备机械手升降部件如图2所示。
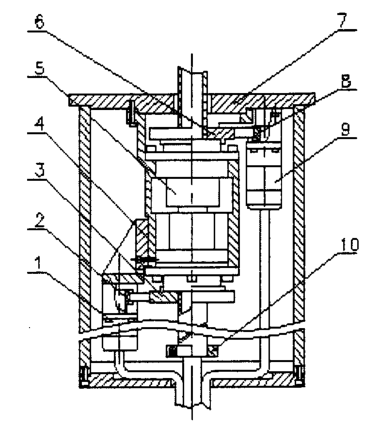
(1)电机(2)同步齿形带轮(3)同步齿形带轮(4)丝杠花键筒(5)滚珠丝杠化键(6)同步齿形带轮(7)上盖板(8)同步齿形带轮(9)电机(10)挡块
图 2 升降旋转运动部件
1.2径向伸缩运动
该半导体薄膜设备中的机械手薄膜部件做径向直线伸缩动作时需要其内部构件两套相互关联的同步齿轮机构相互配合,在齿轮动力作用下形成同步效应,进而带动所有齿轮实现伸缩旋转运动,最后与臂体形成固连,末端臂体在轮系作用下会沿着径向方向形成有序的循环运作模式。
考虑到该设备运行安全性和使用的舒适性,在进行设备调试时应采用内部走线的方式,以防止导向裸露在外受到外界环境污染。同时为增加其荷载,在纯熟系统安装过程中为其配备了人性化的示教盒,可以在机械手编程、维护时,发挥好监控的优势,该设备中的机械手安装了相对独立的控制系统与编程程序,能够对其运参数进行调试,对指令等数据进行传输和通信,其中控制器是控制全部薄膜设备的中心平台。
1.3末端臂体的校正
为了让机械臂对硅片进行非常精准的抓取和传送,还要做好各种机械手臂末端的校正工作。末端致动器要完成径向伸缩运动,一方面要确保它的同步齿轮带轮没有对外转动,另一方面又要确保末端臂体执行器的径向中心线高过同步齿轮带轮的重心。对工程师来说比较有困难的是将末端臂体的径向中心线和同步齿形带轮的中心确认起来相当困难,也很难实现精确定位。
基于空间布局的角度,需要使用特殊的方法才能进行臂体校正。硅片传输机械手在正常运行的状态下,其前臂、后臂与末端臂体是在一条直线上运动的,这种情况下,机械手的伸缩可以达到最远距离,通常会使用该原理进行校正工作。在具体校正的过程中事先需要使用百分表进行初步测量,紧接着再用千分表进行精准定位,由于千分表的量程小,精度高,在校正中具有较高的可靠性[1]。
2硅片传输机械手定位精度分析研究
2.1机械手系统功能测试定位精度
该设备的软件设计包括系统主程序与故障处理两大系统,通过对其手部和肘部功能的维护和调试,可以实现对工件的精确抓取。在机械手系统工程测试定位的过程中,具体会涉及到水,电,气,真空系统和通讯系统等分类。水通过加热回流装置进行加热,以保证设备有一个恒定的温度,满足不同的工艺需求。电方面会涉及到高压电,低压电,高压电保证设备的正常运转,低压电保证设备之间各个部件的正常通讯以及设备端和EAP系统的通讯。气方面会涉及到清洗气体,工艺气体,惰性气体等,清洗气体一般有NF3,O3等,用于清洗工艺完成后在零件表面残留的物质,惰性气体一般有Ar,He等,工艺气体有SIH4,NH3,CO2等,用于在硅片表面生成不同的介质薄膜,真空每个单独的腔都需要一个泵,有三个工艺腔,一个传送腔,和一个与预加热腔,一般传送腔和与预加热腔会共用一个泵,所以一个设备至少需要四个泵通讯半导体通讯协议HSMS连接客户的EAP端和设备端,设备端还会涉及到网络通讯协议,RS232串行通信协议和现场总线协议等,将设备的运动处理装置,传送处理装置,人机界面装置等连接在一起,让设备操作工程师方便快捷的操作设备,高速精准的在硅片上镀膜,镀膜之后的硅片需要满足不同的工艺需求,比如均匀性,应力,颗粒物的数量等,这些数据会通过专业的量测机台进行测试验证,这样才能有效保障设备运行的平稳性、灵活性以及安全性
[2]。
2.2硅片传输机械手调整后重复定位精度
2.2.1硅片传输机械手调整后径向伸缩重复定位精度
目前,在市场中使用的硅片传输机械手具有非常强大的功能性优势,其内部安置的高精度传感器,惯量小、响应快,能够有效提高运行效率,保证硅片定位的精确性。在硅片传输机械手调整后径向伸缩重复定位调试的过程中,应该重点考虑四个重要影响因素:一是机械系统、二是电机参数、三是控制系统。
对于机械系统来说要注意同步齿形带的间隙性,保证其符合动力带动要求,在传输机械臂使用之后,要做好设备维护保养工作,以确定齿轮没有经过受力压迫变形。同时还应注意前臂中带轮和小带轮轴的润滑程度,如果荷载压力过大,会出现打滑等现象[3]。
对于电机参数来说,要做好手动调整,以确保设备平稳性和响应灵活性。
对于控制系统来说,要控制硅片传输机械臂的升降、旋转以及径向伸缩运动等,当系统基本定性后,就需要通过对系统控制环进行一定调整,以保证机械手重复定位精确度,这样才能提高设备运行效率。
2.2.2硅片传输机械手调整后升降重复定位精度
硅片传输机械手为准确地发挥传输和定位功能在升降重复定位精度调试过程中,要做好硅片神经中枢的控制,这是负责硅片传输机械手升降、旋转及伸缩运动的构件。同时,还要考虑开放性、实用性、可靠性和经济性等要求。
2.2.3硅片传输机械手调整后旋转重复定位精度
硅片传输机械手在自动传输中是连续运动的,其动力是通过电机传输的,如果电机出现失控情况,也会增加机械手运行的隐患,因此必须要在机械手适当位置做好保护措施。机械手旋转动作是由电机带动同步齿轮形带轮带动的,旋转运动是基于旋转和升降运动的耦合产生的,通过调试电机转速、旋转半径,通过综合计算能够得到相对精确的定位精度。
结论:集成电路技术是电子信息产业的基础,是推动国民经济发展最重要的高新技术之一,对促进电子信息产业的发展具有重要作用。硅片机械手机械本体结构的设计与功能系统控制精度会直接影响到整个系统运行的稳定性、安全性以及效率,为进一步促进该技术手段发展,要继续加强对该系统构件和运转模式的研究。
参考文献:
[1]高菲.基于PLC的自动线机械手角度自动控制算法[J].信息记录材料,2022,23(09):117-119.
[2]梁晓声,徐生龙,赵忠玉.基于单片机的气动式机械手精确定位控制系统分析[J].现代农机,2020(05):28-29.
[3]雷利霞.PLC气动机械手控制系统的设计与开发[J].农机使用与维修,2022(07):20-22.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号