内蒙古工业大学,内蒙古呼和浩特市,, 010000
摘要
CCD电荷耦合器件图像传感器,在工业相机,天文,光学遥测技术,高速摄影技术方面上具有重要作用,本文从稳定性,灵敏性,和多功能性等方面对CCD的性能进行分析,在深入研究已有的角度测量实验内容的基础上,设计以集成为核心的CCD实验。这样有利于对图像传感器的理解,了解其工作机制,整合这些实验的内容,有利于对图像传感器形成一个有机的联系,从而加强其开发和应用。
引言
随着信息技术的迅猛发展,图像传感器已经深入到国民经济各个部门,成为跨行业应用的器件,它被广泛应用与工业生产的许多方面,凡是需要观察与检测的场所都有应用的可能[1,2]。作为光电技术系列课程中的重要课程,CCD图像传感器实验是把基本理论知识运用到实践的一门课程。课程中学生既能够把相关的原理知识进行分析,又可以合理地运用这些知识指导实验[3,4]。注重理论与实践、原理与应用相结合,在培养学生掌握专业基础理论和分析方法的同时,掌握了科学的实验方法。本文研究通过对不同组分的拆装或更改实验过程,实现利用用一台仪器或同一软件完成多种应用的实验系统结构。通过对角度测量实验各部件和配件设计,实现高性能传感器的核心集成与协作。
利用线阵CCD测量物体倾斜角度的方法有很多,其实质都属于尺寸测量和位移量测量的类型。常用的测量方法有两种。
(1)单色线阵CCD的测量方法:在如图1所示中的水平粗线代表线阵CCD的像敏单元阵列,假设被测物体的轴线与像元排列方向垂直,线阵CCD将测出它的直径宽度为D[5,6],当该物体旋转了角度α后,CCD测量出来的宽度值也发生变化,变为DS。
从如图1所示的测量原理图可以推导出被测物的倾斜角度α的计算公式为
α=cos-1(D/DS) (1)
在未遮光情况下CCD输出一个标准方波,当有物体遮挡光时该区域里就会出现低电平,而这个低电平的像元宽度对应于物体的宽度,由于旋转角度前后遮光的像元宽度不同,根据公式1即可计算得知被测物体的宽度。
这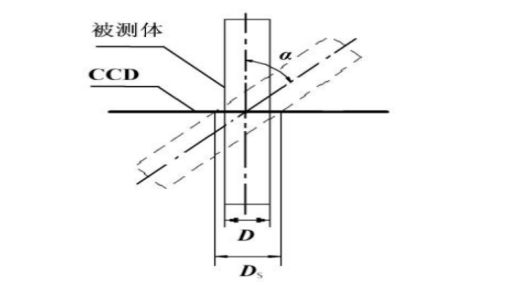
种测量角度的方法比较简单,适用于低精度测量较大尺寸物体的倾斜角。这种方法要求预先知道被测体垂直放置时的宽度,且光学系统的放大倍数不能太高。当被测物体本身的宽度尺寸D有显著变化时,会直接影响角度的测量精度。
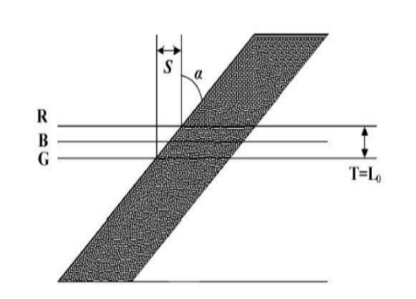
(2)彩色线阵CCD的测量方法:该方法类似于两条具有水平刻度尺的平行线切割被测物体而对其倾斜角度进行测量的原理。彩色线阵CCD器件由3条相互平行的像敏单元阵列构成,且制造工艺保证了三条平行的光敏单元阵列的首尾及像元尺寸的精度极高,使得其中的任
意两行光敏单元阵列能够构成两条刻度尺的特点[7,8],其像元尺寸可视为尺的分度,像元总长可视为测量范围(当然要考虑光学系统的放大倍率),当被测物与线阵CCD像敏单元阵列所成角度α时,便能测量物体倾斜角度。
如图2所示,假设被测物体在CCD像面上的投影如图中所示的灰色部分,R.B.G分别为彩色线阵CCD的三条像敏单元阵列(阵列传感器)。由图可以看出,三条阵列传感器对被测物体成像后的边界是相互错开的,用分离最远的R.G阵列传感器做测量尺,通过对R.G阵列传感器的边界信息的提取测量,便可以测得图2中的偏移量S。而相邻感光单元阵列的间距为64m为已知量(见器件手册),则R.G阵列传感器的间隔距离为两倍的已知间距,故L0=128m。
由此可以推导出待测物体的倾斜角度为
α=ctg-1(T/S) (2)
由于彩色线阵CCD的相邻阵列传感器的距离L0较宽,而同列像元的中心距l0很小,因此用这种方法测角可以获得较高的精度,其角度分辨率为
αmin=ctg-1(l0/L0) (3)
3.1 不规则物体角度测量实验设计
3.11 设计思想
在对实验原理有一定的认识和基础后,开始了解测量物体尺寸和物体角度的实验原理,通过学习发现,手册上在测量角度上只阐述了一些规则且特殊形状的物体测量原理,于是我们通过后期研究,又开发出了一种测量特殊物体角度的方法。理想的理论只能测量规则物体的角度,但是我们实际应用当中所面对的目标物体往往是不规则的。我们可以将目标物体看作是数个规则物体的组合体,在合理的运用以上方法的情况下,我们同样可以测得物体的角度。
如图3所示是一个不规则的物体,如果我们要求得中心开角的度数,显然我们没有直接测量的方法,但是我们可以将该物体从中间分开,将它看做两个各自向两边倾斜的立方体。
如图3所示,R,G,B三条线代表着CCD的三行传感器,将中心开角定义为角![]() ,将其拆分为
,将其拆分为![]() 和
和![]() 。此时的情况则与公式2所适用的情况相同,那么此时有:
。此时的情况则与公式2所适用的情况相同,那么此时有:
![]() (4)
(4)
![]() (5)
(5)
那么中心开角的大小为:
![]() (6)
(6)
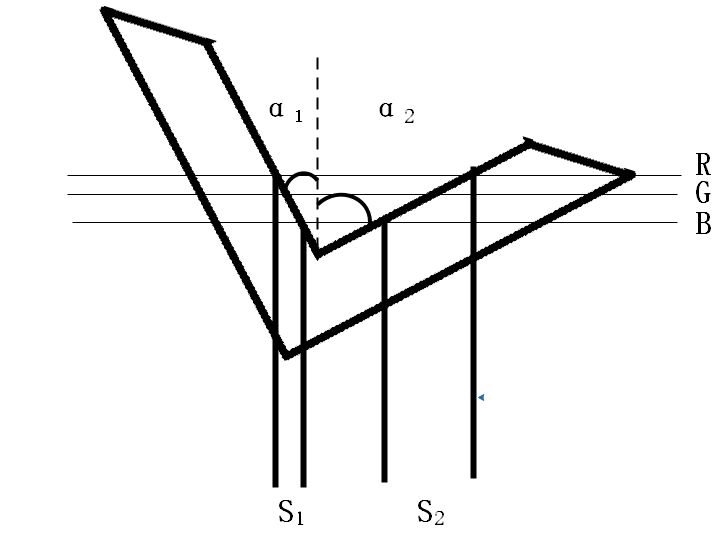
图3 实际物体角度示意图
3.12 设计方案
(1)将被测物体放置在CCD测量系统的光路当中,利用数据采集系统采集实际物体所发出的光强信息。
(2)打开实验三的软件,调整好光学成像系统的焦距后,停止采集,选择“数据结果”菜单。查看线阵CCD所有单元的数据
(3)观察相邻两个像元数据的变化率,将发生由小变大变化率最大处的两列传感器像元序列值分别记录为![]() 和
和![]() 。将由大变小变化率最大处的两列传感器的像元序列值分别记录为
。将由大变小变化率最大处的两列传感器的像元序列值分别记录为![]() 和
和![]() 。带入公式
。带入公式![]() 即可分别得到如图3所示的S1和S2。
即可分别得到如图3所示的S1和S2。
(4)根据公式(2)即可分别得到角![]() 和
和![]() 的大小。
的大小。
(4)将![]() 和
和![]() 相加即可得到实际物体的角度。
相加即可得到实际物体的角度。
3.2 实现高精度测量实验设计
3.21 设计思想
利用测量角度的待测件设计提升物体尺寸测量精度的实验。经过研究发现,当物体和CCD图像传感器各所呈现一定的倾斜角度时,将会大幅度的提升测量精度,减少实验误差[9,10]。
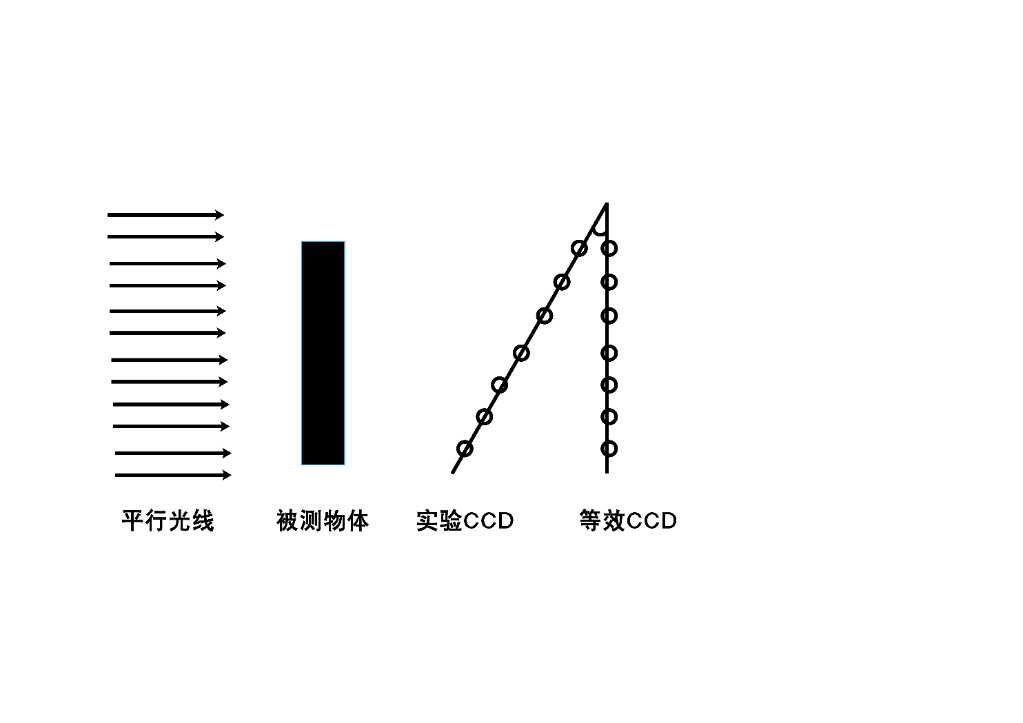
图4 像元细分原理图
如图4所示,圆圈代表线阵CCD上的光敏单元,实验实际所用的CCD的像元间距为L,将该CCD像敏面与被测物体成![]() 角度斜放,等效于被测物体的平行方向上,放一个像元间距为:
角度斜放,等效于被测物体的平行方向上,放一个像元间距为:
| (7) |
的等效线阵CCD,大幅提高了测量系统的精度。其中![]() 的变化区间为
的变化区间为![]() 。
。
同时我们可以将相同的数个单列线阵CCD平行错排斜放[11],则等效的CCD的像元间距为:
(8) |
其中N为平行排列的CCD的个数。
由公式(7)可得,倾斜角度越大,等效CCD的像敏单元尺寸越小,测量精度越高。但是倾斜角度不能为0度,同时需要满足等效线阵CCD的总长度![]() 的最小值要大于被测物体的实际尺寸
的最小值要大于被测物体的实际尺寸![]() ,即需要满足:
,即需要满足:
| | (9) |
其中,![]() 为l的高阶无穷小,等效线阵CCD的总长度为:
为l的高阶无穷小,等效线阵CCD的总长度为:
| | (10) |
其中n为实际的单列线阵CCD中像敏单元的数量,![]() 为实际CCD的总长度。
为实际CCD的总长度。
因此,理论的最佳倾斜角度为:
| | (11) |
此时,等效像敏单元的尺寸在可测量范围内达到了最小值,测量精度达到了最大。
3.22 设计方案
(1)将被测件的倾角侧面对着CCD,运行角度测量软件,测得此时被测器件的倾斜角度![]() 。之后保持角度不变,将被测件旋转90度,使被测件与像敏单元成
。之后保持角度不变,将被测件旋转90度,使被测件与像敏单元成![]() 角。
角。
(2)调整好光学成像系统的焦距后,停止采集,选择“数据结果”菜单,察看线阵CCD所有单元的数据。
(3)观察相邻两个像元数据的变化率,将发生由大变小变化率最大处的像元序列值(位置值)记为“N1”,将由小变大过程中变化率最大处的像元序列值记为“N2”。
(4)不断改变被测件的倾斜角度,重复上述步骤。代入公式![]() ,其中D为此时计算得到的被测物体直径,L0此时等效的像敏单元尺寸。最后计算出误差率,并对不同倾斜角度时的误差率进行比较。
,其中D为此时计算得到的被测物体直径,L0此时等效的像敏单元尺寸。最后计算出误差率,并对不同倾斜角度时的误差率进行比较。
参考文献
王庆友.光电传感器应用技术.北京:电子工业出版社.2013.
[2]张正伟.传感器原理与应用.中央广播电视大学出版社. 1991.
[3]范志刚.光电检测技术.电子工业出版社.2004.
[4] 曾光宇,张志伟,张存林.光电检测技术.北京:清华大学出版社,2005.
[5] 梁世杰. 基于线阵CCD的非接触式直径测量系统研究.南京理工大学硕士学位论文, 2012.
[6]杨小刚.图像二值化方法在CCD图像信息处理中的研究. 2011.
[7]万英.董海燕.李昊等.CCD二值化测量的阈值自动调节方法[J].光学技术, 2003.29(3):370-371.
[8] 陈兴梧等.一种新型玻管外径及壁厚自动测控仪器.天津大学学报,1996,29(3) : 388-394.
[9] 尹刚, 彩色CCD测量系统的研究与设计.重庆大学硕士学位论文,2010.
[10]张南洋生,张波,杨坤 涛.一种变阈值二值化CCD像元细分技术研究[J].半导体光电,2006,27(4):471-474.
[11] 卢佳宝,韩学辉,王彩霞. 基于线阵CCD的精密尺寸测量系统. 光电子激光, 2019 30(9)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



