69243 部队
摘要:在未来的战场上,敌方的目标众多,同时我军在炮兵群的编制方面较为复杂,而在高寒山地地区的反击作战爆发速度极快,因此对于火力的要求相对较高,为此对辅助装弹系统进行研究很有必要。为此本文就将集中研究高原高寒条件下辅助装弹系统的气动运动实现与传动性能,由高原高寒地区炮兵作战特点入手,具体研究辅助装弹系统的构型及相关参数,同时就运动学层面对其展开研究。
关键词:高原高寒条件;辅助装弹系统;气动运动;性能研究
高原高寒地区炮兵作战特点
1.1高原高寒地区环境特点
通常情况下高原高寒地区的平均海拔超过了4000米,而在大气压及氧分压方面其数值相较于正常条件则是会有44%和39%的下降,随着海拔的进一步上升其大气压力及大气当中的含氧量也会进一步的减少。在海拔4000米以上的地区其四季平均温度相较于同纬度的地区会低20℃,而由于空气稀薄的原因紫外线的强度也会相较于平原高出40-50%。而在高原高寒地区的公路条件通常是低等级公路,其运输效率也是相对较低。部分地区的运输具有极强的季节性,因此在战役运输方面也是极为不便捷的。
1.2高原高寒地区对炮兵火力分配影响
高原高寒环境对炮兵火力分配的影响首先体现在战术性能的下降方面,在高原山地进行作战人员及武器装备都需要人受缺氧、高寒、湿度不平均的情况,其具体于人员方面其主要是缺氧导致的体能、耐力下降,同时容易受到冻伤的影响出现非战斗减员。而对于炮兵装备的影响则是降低最大弹药发射量,即为在相同时间当中炮兵能够在阵地进行的最多数量炮弹发射数量会减少,为此对辅助装弹系统进行研究很有意义[1]。
1.3高原高寒炮兵目标价值分析
高原高寒地区炮兵目标价值分析是为了在固定的条件之下完成必要的综合性指标分析,以求实时把握战局的同时能够将最大化的火力优势。为此在对其体系进行构建的过程当中要对其进行详尽的分析,首先对战役的发展时间节点进行确认,同时对作战任务及不同的层次及数据进行确认。此后根据上述内容完成目标相应价值及时限的确认。最后确立合理的价值指标体系,完成目标数据库的进一步拓展,通过这样的方式使炮兵阵地的火力打击发挥出最大的价值。
辅助装弹系统构型及参数化设计
2.1弹仓结构改进
通常情况下辅助装弹系统的结构为直线型设计,而为了对其进行发展其在有限的空间下将其改进为偏置性的弹仓结构,通过这样方式的改进其弹仓的长度能够得到缩短,因此具体改变的结构内容包括滚筒的半径、滚子的直径及半径等参数。当数值到达一定数值时,其整体的结构是固定的,在对滚筒的数量及总数进行研究后能够发现其并非常规的结构尺寸参数,因此其在整体的设计过程当中上述两项参数能够起到决定性的作用同时无法替代,甚至是在进行后续的人机交互训练时也需要使用两个不同的参数进行对待[2]。
2.2系统位置补偿分析方法
在传动系统当中存在多边形效应是必然的现象,而如何对其现象进行解决则是辅助装弹系统当中的一项具体细节。当链传动机构进行运动的过程当中,受到多边形效应的影响其链条可能会被拉伸或是压缩,而这种想的产生是由于在直线运动的过程当中两端的速度不同所导致的。而为了对其多边形效应进行解决,就需要解决二者速度不同的问题,具体的物理模型见下图1。
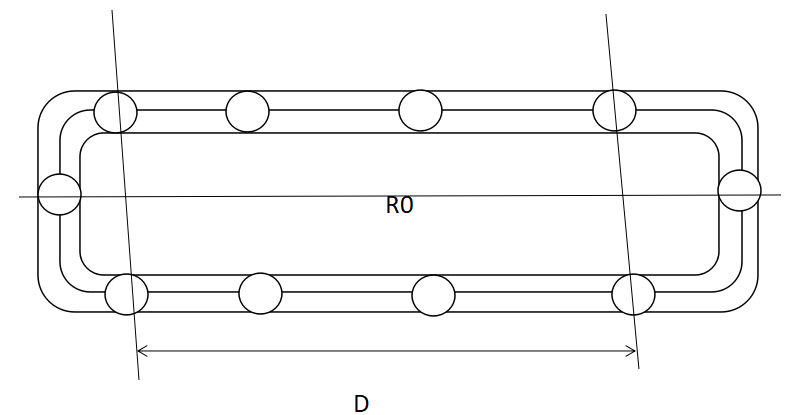
图1 轨道约束链传动物理模型
其中D为两个链轮中心的距离,而R0为链轮分度圆的半径,由此可知在对销轴进行直线段运动计算的过程当中其公式应遵循:

由此可发现销轴A的函数为 函数,也就是在运动线段运动的过程当中销轴的速度与链轮区域的位置相关,可知其函数详情见下图2。
函数,也就是在运动线段运动的过程当中销轴的速度与链轮区域的位置相关,可知其函数详情见下图2。
图2 销轴转速曲线图
2.3系统结构设计
假定在传动结构当中结构的要求是在一个长160cm宽90cm的矩形范围当中完成传动机构的设计,同时使其能够尽可能地完成辅助装弹方面的工作则需要是传动机构能够围绕两个不同的轮链完成运动,而其中一个需要完成驱动轮的工作[3]。在对其进行计算的过程当中其需要符合几何关系:

而在对其实际情况进行考量后发现相邻的辅助装弹仓会由于颠簸出现相互干涉的情况,因此需要保存至少10mm的缝隙整理后得出:

辅助装弹系统运动学分析
3.1结构运动学分析
在通过上文的内容后能够发现后续的研究当中需要对其进行运动学分析,而在运动学分析的过程当中没有固定的传输距离及回转路径内容能够进行套用,也就是说大部分的研究其数学模型都是一次性的[4]。目前辅助装弹系统的结构形式多事异性链装置结构,其与常规的结构方式有所不同,其运动轨迹不会受到周边的约束,从而得出具体的数值及结构参数,具体详情见下表1。
参数名称 | 滚筒半径 | 销轴半径 | 链节长度 | 内轨道滚筒数 | 总滚筒数 |
参数值 | R=92 | rr=17.2 | L=213 | Inum=6.6 | Count=19 |
表1 结构参数表
3.2主动轮啮入去运动分析
而在主动齿啮合区域当中完成组合式串联机构的分离后能够发现其会成为一个曲柄摇杆机构,在实现辅助装弹系统的装配过程当中其应当满足的分量机械形式是:
上述两项方程对辅助装弹系统的啮合节点及相关的从动角速度进行了研究,由此得出了某时刻的动件质心角速度。在此后的研究当中能够进一步通过公式求得从动轮的质心速度。
3.3补偿器运动分析
最后在辅助装弹系统当中同样需要补偿器设备,其设备被称为曲柄滑道机构,曲柄滑道结构的结构有所不同气味曲柄摇杆结构的变种形式,在其变种后其摇杆改为弧形滑块,同时机架成为环形滑槽,弧形滑块在滑槽当中进行运动能够完成曲柄滑道结构的构建。通过这样的方式其能够建立称为补偿弹道轨迹的物理装置,而在根据此要求进行设计后,啮合周期中的销轴运动轨迹是确定的,为此在此过程当中各个结构件的速度及角度能够使用近似法求出并应用到实际中[5]。
结语:在国防军事力量中炮兵的作战能力起到了极大的作用,而炮兵作战的环境同样复杂多变。通过本文的论述完成了高原高寒环境下辅助装弹系统的气动运动实现与传动性能方面的研究,希望能为相关方面的发展做出一定的贡献,同时起到抛砖引玉的作用为日后的研究提供一些理论上的支撑。
参考文献:
[1]朱鹏飞,严宏志,陈志,伊伟彬,吴顺兴.齿轮齿面喷丸强化研究现状与展望[J].表面技术,2020,49(04):113-131+140.
[2]王卓尔. 多层齿孔钢带的传动和疲劳性能试验装置的研究[D].西北农林科技大学,2019.
[3]范润露. 一种柔性软驱动机构的传动性能的实验研究[D].北京邮电大学,2017.
[4]李晓彤. 35mm双管转膛自动机总体设计与动力学仿真[D].中北大学,2016.
[5]刘巍. 武装直升机与航炮动力学研究[D].南京理工大学,2009.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



