中国电子科技集团第四十三研究所 安徽省 合肥市 230088
摘要:本文介绍了一种用于三相同步电机驱动控制的数字分频移相技术,通过分频移相把512kHz方波信号转换为三路1kHz且相位依次差120°的方波信号,从电路功能、指标要求、电路原理和设计技术分析等方面进行了阐述,并进行了仿真,且实现了产品化。
关键词:三相;同步电机;驱动控制;分频;移相
1 引言
电机在当今世界中的应用非常广泛,甚至可以说有运动的地方就可能有电机的存在,三相同步电机就是其中的一部分,作为电机系统的灵魂,控制技术和驱动技术将起到越来越重要的作用。
三相同步电机对三路控制驱动信号的频率和相位差精度要求较高,本文介绍了一种分频移相电路,输入512kHz方波信号,输出为三路1kHz且相位依次差120°的方波控制信号,要求三路控制信号的频率精度1±5×10-7kHz,相位差满足120°±0.6°,本文结合设计指标要求给出了分频移相的技术方案,并对技术方案进行分析和仿真,最终仿真计算和实际电路测试指标都满足要求。
2 设计原理概述
如图1所示,首先将输入方波信号经过分频和逻辑处理,按脉冲数计算得到了伪384kHz的方波信号,再经过分频器64分频得到伪6kHz的方波信号,然后经过移位寄存器进行移相和分频得到三路1kHz且相位相差120°的方波信号。
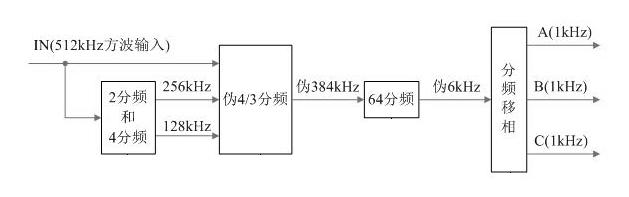 图1 分频移相电路框图
图1 分频移相电路框图
分频移相电路用于对功率驱动的控制,主要指标为分频的频率精度和移相的相位差精度。采用的是分立数字电路芯片设计,分频移相的关键就是在初始分频时要把周期分的足够小,以保证移相的精度,同时在移相时要分析数字电路运行的稳定性。
3 电路的设计
3.1 4/3分频
电路先由512kHz的方波信号经过分频得到256kHz、128kHz两种频率的信号,这两信号与512kHz方波信号一起按如图2所示进行逻辑处理。仿真波形如图3所示,严格意义上进行了4分频得到128kHz信号,按脉冲数计算进行4/3分频得到了伪384kHz的方波信号。以512kHz的周期(1.953125us)为一个时钟T,则3个方波间隔时间为1.1T、1.5T、1.4T。
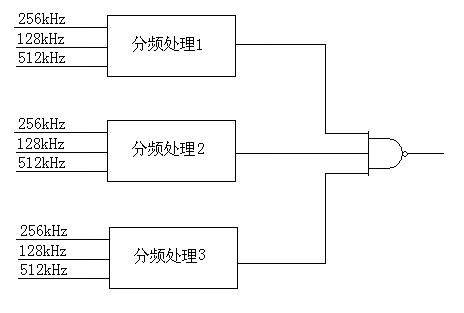
图2 4/3分频部分电路
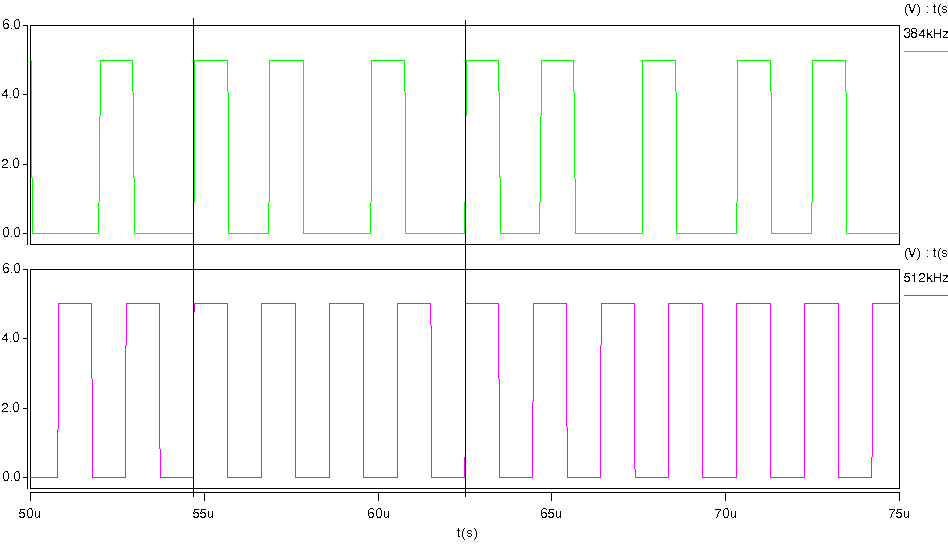
图3 4/3分频部分电路仿真波形图
3.2 64分频
把这种伪384kHz(实际128kHz)的方波信号再通过分频器进行64分频,得到了伪6kHz(实际2kHz)的方波信号,即连续三个方波间隔时间不同,分别为166.22us、166.99us、166.78us,以512kHz的周期(1.953125us)为一个时钟T,则三个方波间隔时间分别为85.1T、85.5T、85.4T,如图4所示。
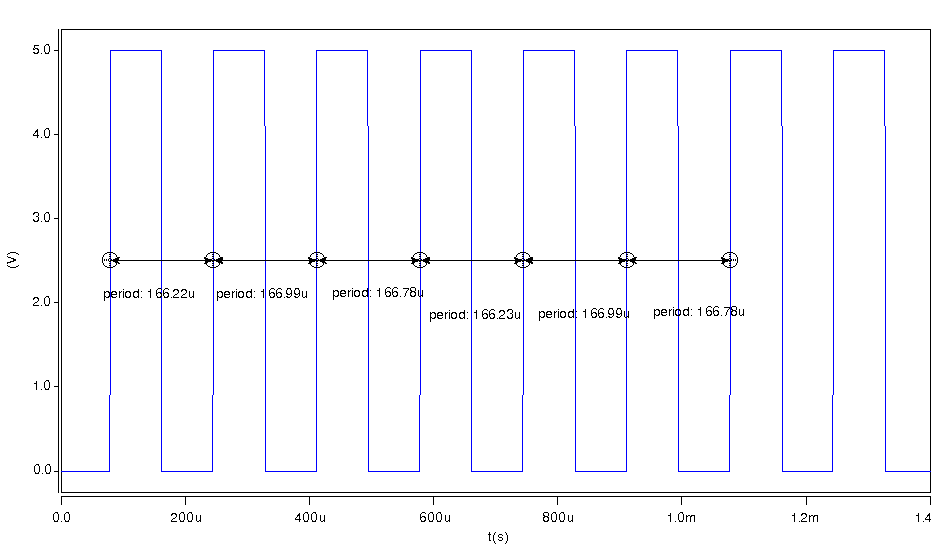
图4 64分频部分电路仿真波形图
3.3 分频移相
把伪6kHz(实际2kHz)的方波信号作为移位寄存器N6的时钟触发信号,分频移相电路图如图5所示。
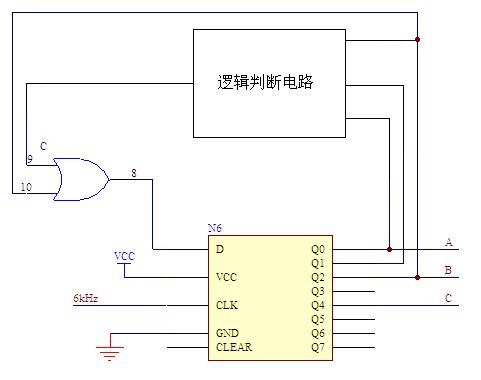
图5 分频移相电路图
以移位寄存器的初始输出状态全为零,则其状态转移表如表1所示。取Q0 、Q2 、Q4为三路输出的控制信号,6个触发时钟为1个周期,则其输出控制信号的周期时间为85.1T+85.5T+85.4T+85.1T+85.5T+85.4T =512T,频率为512kHz/512=1kHz,三个控制信号的时间差分别为85.1T+85.5T=170.6T,85.4T+85.1T=170.5T,85.5T+85.4T=170.9T,其相位差分别为170.6T/512T×360°=119.953°, 170.5T/512T×360°=119.882°, 170.9T/512T×360°=120.164°, 相位差满足120°±0.6°的指标要求。
分频移相电路包含了纠错电路,即逻辑判断电路,如图5所示,反馈信号为移位寄存器N6的Q0 Q1 Q2,Q3 Q4是通过Q2移位过来的,所以分频移相电路主要分析Q0 Q1 Q2的运行情况,表1中,Q0 Q1 Q2共有6种状态000、100、110、111、011、001,并按这6种状态进行周期循环。按照排列组合这3个状态点共有8种状态,还有010、101两种状态未出现在周期循环中。在电路产品使用过程中,特别是在刚开始上电,或出现干扰时可能会出现010、101两种状态,当Q0 Q1 Q2在6种状态000、100、110、111、011、001循环时,D取Q2的反相状态值,而当Q0 Q1 Q2出现010、101两种状态时,D取Q2的原状态值。当开始出现010、101两种状态时,其状态转移表如表2、表3所示,状态被拉回到正常的循环周期,Q0 Q1 Q2的状态转移图如图6所示。
表1 Q0Q1Q2初始状态000时的状态转移表
时钟序号 | Q0 | Q1 | Q2 | Q3 | Q4 |
1 | 0 | 0 | 0 | 0 | 0 |
2 | 1 | 0 | 0 | 0 | 0 |
3 | 1 | 1 | 0 | 0 | 0 |
4 | 1 | 1 | 1 | 0 | 0 |
5 | 0 | 1 | 1 | 1 | 0 |
6 | 0 | 0 | 1 | 1 | 1 |
7 | 0 | 0 | 0 | 1 | 1 |
8 | 1 | 0 | 0 | 0 | 1 |
表2 Q0Q1Q2初始状态010时的状态转移表
时钟序号 | Q0 | Q1 | Q2 | Q3 | Q4 |
1 | 0 | 1 | 0 | 0 | 0 |
2 | 0 | 0 | 1 | 0 | 0 |
3 | 0 | 0 | 0 | 1 | 0 |
4 | 1 | 0 | 0 | 0 | 1 |
5 | 1 | 1 | 0 | 0 | 0 |
6 | 1 | 1 | 1 | 0 | 0 |
7 | 0 | 1 | 1 | 1 | 0 |
8 | 0 | 0 | 1 | 1 | 1 |
9 | 0 | 0 | 0 | 1 | 1 |
10 | 1 | 0 | 0 | 0 | 1 |
表3 Q0Q1Q2初始状态101时的状态转移表
时钟序号 | Q0 | Q1 | Q2 | Q3 | Q4 |
1 | 1 | 0 | 1 | 0 | 0 |
2 | 1 | 1 | 0 | 0 | 0 |
3 | 1 | 1 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 1 | 1 |
6 | 0 | 0 | 0 | 1 | 1 |
7 | 1 | 0 | 0 | 0 | 1 |
图6 Q0 Q1 Q2的电路状态转移图
三路输出的仿真波形如图7所示。
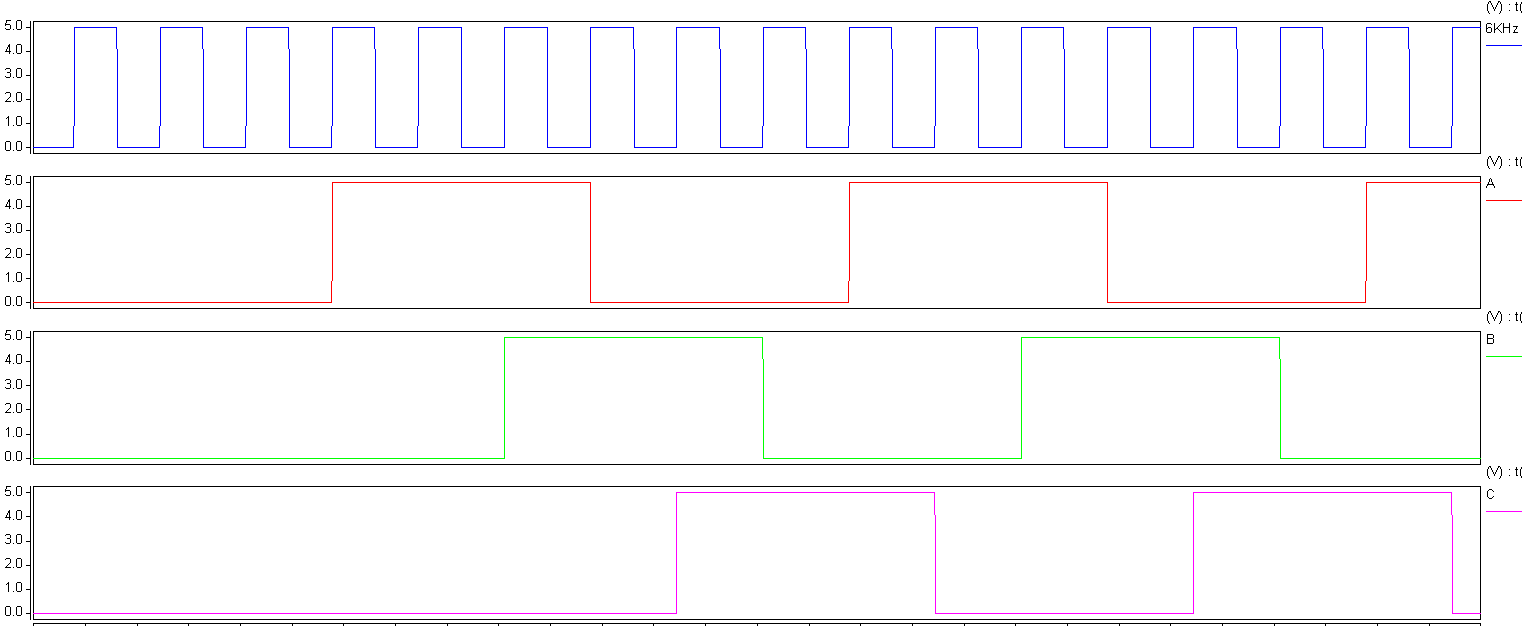
图7 三路TTL方波仿真图
4 仿真结果与测试结果
通过仿真计算,输出信号的频率是对输入信号进行512分频后的频率,所以输出信号的频率精度与输入信号频率基本一致,三路输出信号的相位差通过前面的计算分别为170.6T/512T×360°=119.953°, 170.5T/512T×360°=119.882°, 170.9T/512T×360°=120.164°。
产品实际测量结果为:输入信号精度为1±5×10-8kHz时,输出信号精度也能保证在1±5×10-8kHz,三路输出信号的相位差精度在120°±0.3°。
5 结论
三相同步电机控制驱动电路由分频移相电路和功率驱动电路组成,为系统提供三路1kHz且相位相互差120°的方波驱动信号,本文主要论述了其中的分频移相电路,对设计电路进行了分析和仿真,并给出了仿真计算和实际测量结果,为同类电路的设计提供了参考,具有一定的实用性。
参考文献
[1]王毓银.脉冲与数字电路(第二版).高等教育出版社.1992.
[2]阎石.数字电子技术基础教程.清华大学出版社.2007.
[3]CMOS数字集成电路产品手册.电子工业部国营第八七八厂.1984.
第一作者简介
周向红(1979- ),男,安徽望江人,硕士研究生,控制理论与控制工程专业,现主要从事信号处理与控制电路的设计
6

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



